LEGO EV3 Robotic Arm
The Goal
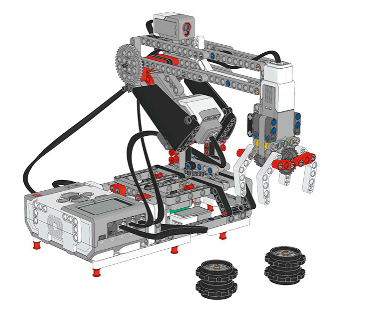
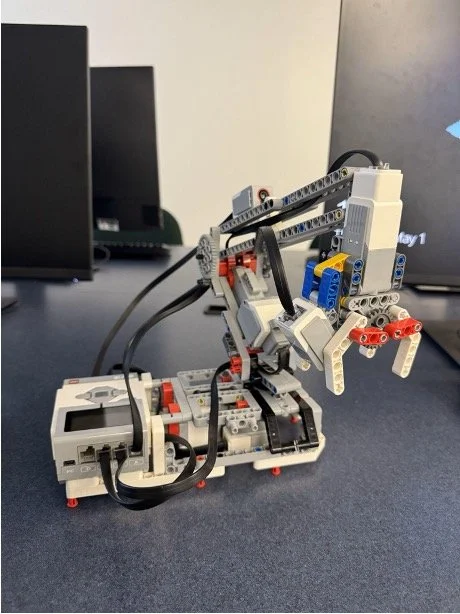
Build and code a lego ev3 robotic arm with RGB detection
The Process
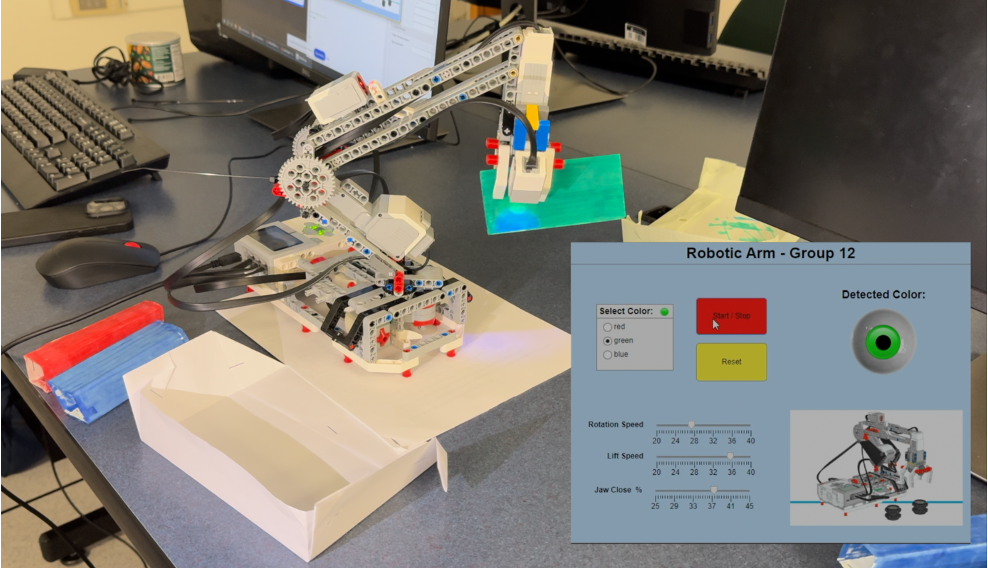
A robotic arm was developed using the LEGO EV3 platform and programmed in MATLAB to autonomously sort objects based on color detection. The system utilized an RGB color sensor to identify objects and determine whether they matched the selected target color. Once detected, the arm executed a pick-and-place sequence to grasp and relocate the object. The arm’s motion was controlled through multiple EV3 motors that allowed independent adjustment of lift speed, rotational speed, and grip strength, enabling precise manipulation of different objects. MATLAB was used to process sensor input, implement the control logic, and coordinate motor commands, creating a responsive system capable of detecting and sorting colored objects in real time.
The Result
Testing showed that the robotic arm was able to successfully detect and sort objects of the selected color under consistent lighting conditions. The adjustable lift speed, rotation speed, and grip strength allowed the arm to reliably pick up and place objects with controlled movement. However, performance was noticeably affected in low-light environments, where the RGB sensor had difficulty accurately distinguishing colors.